配置相應數量的存儲設備。
3、智能監測系統設計
整個監測系統可以總體(tǐ)分(fēn)爲數據采集模塊、主體(tǐ)監測系統、報警模塊、異常定位模塊,如下(xià)圖所示。通過數據采集模塊獲取視頻(pín)圖像數據并輸入到主體(tǐ)監測系統,主體(tǐ)監測系統對獲取的圖像進行分(fēn)析監測,通過内部判定模塊選擇是否給報警模塊發送信息,執行異常報警,同時對異常圖像内部異常區域進行定位。
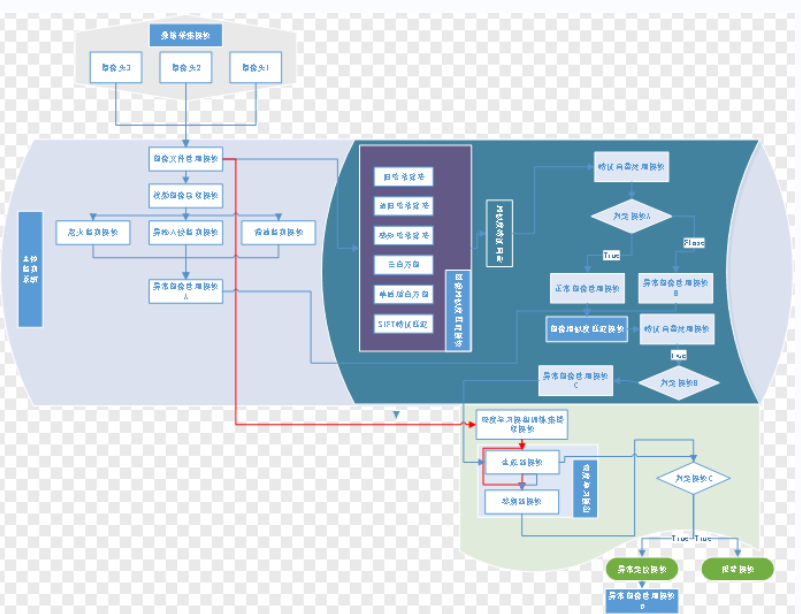
圖7 監測系統示意圖
圖7中(zhōng)藍(lán)線表示監控過程,紅線表示深度學習模型訓練過程,隻在初始監控階段運行。下(xià)面介紹各個模塊功能及運行流程。
1.1.1 數據采集模塊
數據采集模塊由三個攝像頭組成,每個攝像頭對應一(yī)片監控區域。攝像頭靜止不動,在無異常發生(shēng)時,監控區域基本不發生(shēng)變化。
1.1.2 主體(tǐ)監測系統
(1)圖像文件管理模塊
圖像文件管理模塊用去(qù)儲存管理從多個攝像頭獲取的監控區域視頻(pín),将視頻(pín)轉爲圖像幀。
(2)視頻(pín)圖像讀取模塊
該模塊用于将不同監控區域下(xià)的視頻(pín)流圖像按照時間先後順序分(fēn)别輸入到下(xià)面3個異常監測模塊中(zhōng)。
(3)機倉漏油監測模塊
該模塊用于機倉是否出現漏油。通常情況下(xià),當齒輪箱底部發生(shēng)滲漏油時,漏油區域的顔色一(yī)般會呈現黃褐色,因此可以基于該顔色特征對齒輪箱滲漏油現象進行識别。首先将輸入的BGR圖像轉變爲HSV圖像。之後在HSV空間中(zhōng)設計目标對應顔色區間,得到HSV圖像中(zhōng)的目标區域。考慮到會存在噪聲區域的幹擾,因此執行形态學處理以獲取更加準确的目标區域掩膜。之後執行按位與操作來獲取BGR空間中(zhōng)的目标區域。考慮到圖像中(zhōng)可能存在與油液相同顔色的物(wù)體(tǐ),以及通常漏油區域爲較小(xiǎo)的近似圓形區域,通過計算漏油區域的面積以及圓形度大(dà)小(xiǎo),根據定義的阈值,從而可以判斷機倉是否存在漏油。當出現漏油,則向報警模塊傳遞信息。具體(tǐ)流程圖如下(xià)圖所示。
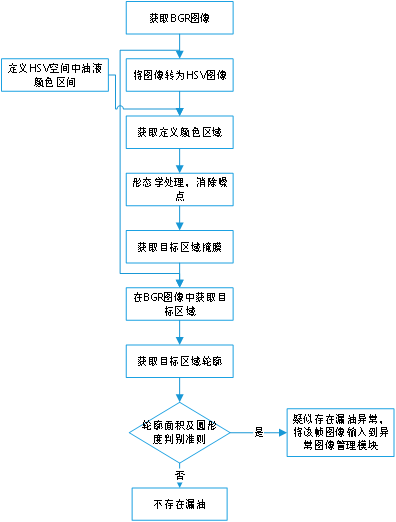
圖8 漏油監測模塊流程圖
(4)塔筒異物(wù)入侵監測模塊
該模塊用于監測機艙異物(wù)入侵,算法基于三幀差分(fēn)法。塔筒中(zhōng)設置了許多風電(diàn)機組運行必要的線纜和設備,非專業人員(yuán)的進入可能會對線纜設備造成損害,影響機組運行,及時的發現和處理可以有效保護機組設施的安全運行。當存在異物(wù)入侵,獲取的每幀圖像會發生(shēng)較大(dà)的變化,因此爲識别入侵的異物(wù),可以采用對運動物(wù)體(tǐ)輪廓的提取優于二幀差法的三幀差分(fēn)法。首先通過差分(fēn)操作獲取兩個差分(fēn)圖像,之後需要對差值圖像進行灰度化處理、高斯濾波平滑圖像,去(qù)除噪聲影響;考慮在斜向的光照下(xià)異物(wù)在地面上會産生(shēng)較長的影子,後面采用開(kāi)運算可以有效的去(qù)除光線造成的陰影問題,并且可以去(qù)除離(lí)散較小(xiǎo)的白(bái)點;當非外(wài)物(wù)入侵而造成的白(bái)點較爲集中(zhōng)并且不能有效去(qù)除時,用白(bái)點數目進行阈值判斷,降低誤報概率。最後,提取區域輪廓,利用獲取的最大(dà)輪廓面積來判斷是否存在異物(wù)入侵。當出現異物(wù)入侵,則向報警模塊傳遞信息。具體(tǐ)流程圖如







